在工業(yè)自動化、智能監(jiān)測與物聯(lián)網(wǎng)技術(shù)飛速發(fā)展的今天,對各類儀表(如壓力表、溫度計、流量計等)的讀數(shù)進行高效、準確的自動識別,已成為實現(xiàn)設(shè)備狀態(tài)實時監(jiān)控與數(shù)據(jù)智能采集的關(guān)鍵環(huán)節(jié)。傳統(tǒng)的目視抄表方式不僅效率低下、易出錯,而且難以滿足大規(guī)模、實時性的數(shù)據(jù)需求。因此,開發(fā)一種基于計算機視覺與機器學(xué)習(xí)技術(shù)的自動識別系統(tǒng)具有重要的現(xiàn)實意義。本文將探討一種結(jié)合OpenCV(開源計算機視覺庫)與LSSVM(最小二乘支持向量機)的數(shù)字儀表讀數(shù)自動識別技術(shù)方案。
一、 系統(tǒng)總體框架
該自動識別系統(tǒng)的核心流程可分為四個主要階段:圖像預(yù)處理、儀表區(qū)域定位與分割、字符分割與特征提取,以及最終的字符識別與結(jié)果輸出。整個系統(tǒng)以O(shè)penCV作為圖像處理的核心工具,利用其強大的圖像處理功能完成前三個階段的視覺任務(wù),最后使用LSSVM分類器完成數(shù)字字符的識別。
二、 關(guān)鍵技術(shù)步驟詳解
1. 圖像預(yù)處理
原始采集的儀表圖像往往存在光照不均、背景復(fù)雜、存在噪聲等問題。預(yù)處理的目標是增強圖像質(zhì)量,為后續(xù)步驟奠定基礎(chǔ)。主要操作包括:
- 灰度化:將彩色圖像轉(zhuǎn)換為灰度圖像,減少計算量。
- 濾波去噪:使用高斯濾波或中值濾波消除圖像中的隨機噪聲。
- 圖像增強:采用直方圖均衡化或?qū)Ρ榷认拗频淖赃m應(yīng)直方圖均衡化(CLAHE)技術(shù),改善圖像對比度,使數(shù)字區(qū)域更加清晰。
- 二值化:采用自適應(yīng)閾值法(如Otsu算法)或局部閾值法,將圖像轉(zhuǎn)換為黑白二值圖像,突出前景(數(shù)字和指針)與背景的差異。
2. 儀表區(qū)域定位與數(shù)字區(qū)域分割
在復(fù)雜的背景中準確定位儀表表盤并提取讀數(shù)區(qū)域是本系統(tǒng)的難點之一。通常采用以下策略:
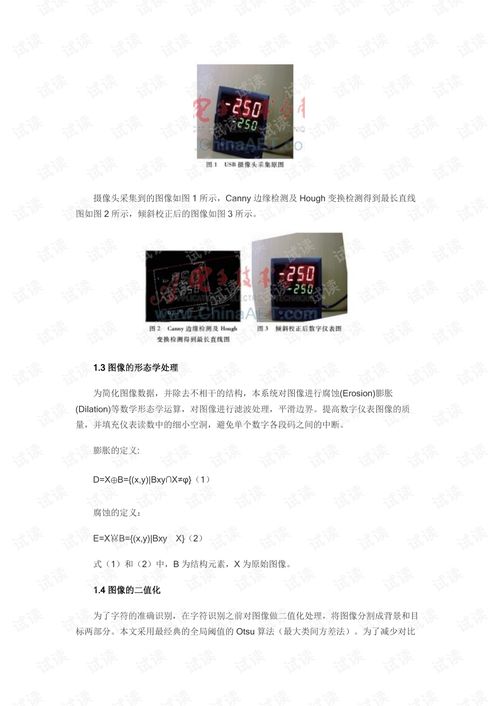
- 輪廓檢測:利用OpenCV的
findContours函數(shù),在二值圖像中查找所有輪廓。根據(jù)儀表表盤通常為圓形或矩形等先驗知識,通過輪廓的面積、周長、外接矩形或擬合圓等幾何特征進行篩選,定位出儀表主區(qū)域。 - 透視變換:若攝像頭拍攝角度導(dǎo)致儀表區(qū)域存在透視畸變,可通過提取表盤輪廓的四個角點進行透視變換,校正為正面視圖。
- ROI(感興趣區(qū)域)提取:在定位到的表盤區(qū)域內(nèi),根據(jù)儀表型號和安裝的固定位置,可以預(yù)先設(shè)定或通過霍夫變換檢測指針軸心等方式,確定顯示數(shù)字的LCD屏或機械式數(shù)字輪的區(qū)域坐標,并將其裁剪出來作為后續(xù)處理的ROI。
3. 字符分割與特征提取
從數(shù)字區(qū)域中精確分割出單個字符是識別的關(guān)鍵前提。
- 字符分割:對數(shù)字區(qū)域ROI進行二次二值化、形態(tài)學(xué)操作(如膨脹、腐蝕)以連接斷裂筆劃或去除小噪點。利用水平投影法(分析像素在垂直方向的分布)確定字符的上下邊界,再利用垂直投影法確定每個字符的左右邊界,從而實現(xiàn)單個字符的切割。對于可能存在字符粘連的情況,可采用滴水算法或基于輪廓的精細分割方法。
- 特征提取:將分割歸一化后的單個字符圖像(如統(tǒng)一縮放至16x16像素)轉(zhuǎn)換為特征向量。常用的特征包括:
- 像素強度特征:直接將歸一化圖像的像素點按行或列展開成一維向量。
- 方向梯度直方圖(HOG):能夠很好地描述字符的形狀和輪廓信息,對光照和輕微形變具有魯棒性。
- 特征點描述符:如SIFT或SURF特征,但計算量相對較大。
提取的特征向量將作為LSSVM分類器的輸入。
4. 基于LSSVM的字符識別
支持向量機(SVM)在解決小樣本、非線性分類問題上表現(xiàn)出色。LSSVM是標準SVM的一種擴展,它將不等式約束改為等式約束,將二次規(guī)劃問題轉(zhuǎn)化為求解線性方程組,從而提高了求解速度,尤其適用于在線實時識別場景。
- 模型訓(xùn)練:需要構(gòu)建一個包含足夠樣本的數(shù)字字符訓(xùn)練集(0-9以及可能的負號、小數(shù)點等)。對訓(xùn)練集中的每個字符圖像完成上述的特征提取,得到特征向量及其對應(yīng)的標簽(即字符類別)。使用這些數(shù)據(jù)訓(xùn)練一個多分類LSSVM模型(可采用“一對一”或“一對多”策略構(gòu)建多個二分類器)。訓(xùn)練過程即尋找最優(yōu)的核函數(shù)(如線性核、多項式核、徑向基RBF核)及其參數(shù),使模型在驗證集上達到最高的識別準確率。
- 識別預(yù)測:對于待識別儀表圖像,經(jīng)過前述步驟得到的單個字符特征向量,輸入到已訓(xùn)練好的LSSVM多分類模型中,模型將輸出其所屬的數(shù)字類別。將所有識別出的字符按順序組合,并考慮小數(shù)點的位置,即可得到最終的儀表讀數(shù)結(jié)果。
三、 技術(shù)優(yōu)勢與挑戰(zhàn)
優(yōu)勢:
1. 高精度與魯棒性:OpenCV提供了成熟的圖像處理算法,能有效應(yīng)對光照、角度、部分遮擋等干擾。LSSVM在小樣本下具有良好的泛化能力和較高的分類精度。
2. 處理速度較快:相較于深度學(xué)習(xí)方法,LSSVM模型輕量,預(yù)測速度快,結(jié)合OpenCV的優(yōu)化,能滿足許多實時性應(yīng)用的需求。
3. 靈活性高:針對不同類型的儀表,可以通過調(diào)整預(yù)處理、定位和特征提取的參數(shù)來適應(yīng),模型重新訓(xùn)練也相對便捷。
挑戰(zhàn)與改進方向:
1. 復(fù)雜背景與極端條件:在背景極其復(fù)雜、光照劇烈變化或儀表嚴重污損的情況下,定位和分割的穩(wěn)定性會下降。可引入更魯棒的深度學(xué)習(xí)目標檢測模型(如YOLO)進行初定位。
2. 字符粘連與斷裂:對于低質(zhì)量圖像,字符分割仍是難點。需要結(jié)合更先進的圖像形態(tài)學(xué)處理和分割算法。
3. 模型泛化能力:當遇到訓(xùn)練集中未出現(xiàn)過的字體或樣式時,LSSVM可能表現(xiàn)不佳。可以通過數(shù)據(jù)增強擴充訓(xùn)練集,或考慮使用卷積神經(jīng)網(wǎng)絡(luò)(CNN)等深度學(xué)習(xí)方法,后者在特征提取與泛化方面更具優(yōu)勢,但需要更多的數(shù)據(jù)和計算資源。
四、 應(yīng)用展望
基于OpenCV與LSSVM的數(shù)字儀表讀數(shù)自動識別技術(shù),為工業(yè)現(xiàn)場、實驗室環(huán)境、智能樓宇等場景下的儀表數(shù)據(jù)自動化錄入與監(jiān)控提供了一種高效、可靠的解決方案。隨著邊緣計算設(shè)備的普及,該輕量級方案易于部署在嵌入式設(shè)備或網(wǎng)關(guān)中,實現(xiàn)端側(cè)的實時識別與數(shù)據(jù)上報,進一步推動設(shè)備管理的智能化與數(shù)字化進程。將該經(jīng)典機器視覺流程與深度學(xué)習(xí)技術(shù)相結(jié)合,取長補短,將是提升系統(tǒng)在復(fù)雜場景下性能的重要發(fā)展方向。